Bluetooth Technology
Silan Liu
5. Logical Link Control and Adaption Protocol (L2CAP)
6. Service Discovery Protocol (SDP)
1.
Bluetooth Overview
1.1. Why Bluetooth
Bluetooth is a short-range radio link
intended to replace the calble(s) connecting portable and/or fixed electronic
devices. Key features are robustness, low complexity, low power and low cost
[1]. There are already similar standards in this market, such as IrDA,
HomeRF and IEEE 802.11 family. Bluetooth is designed to offer some unique
advantages that none of the others can provide.
For example, IrDA uses infrared as medium,
so its range is limited to around 1 meter, and it requires a line-of-sight
communication. In comparison, Bluetooth can operate at a range up to 10 meters,
or even 100 meters with enhanced transmitters. RF signals goes through walls,
so a Bluetooth network can span several rooms.
Compared with HomeRF and IEEE 802.11
family, Bluetooth has much lower data rate and transmission range (10 meter).
While HomeRF supports 1.6 ~ 10 Mbps data rate and IEEE 802.11a/b supports 54/11
Mbps, Bluetooth supports only 780 Kbps, which can be used for 721 kbps
downstream and 57.6 kbps upstream asymmetric data transfer, or 432.6 kbps
symmetric data transfer. Both HomeRF and IEEE 802.11 operates at 100 meter
range, while Bluetooth operates at up to 10 meter.
However, as a result of the lower data rate
and transmission range, Bluetooth offers much lower cost per node
(approximately 5 ~ 10% of HomeRF and IEEE 802.11). So it is more suitable for
applications involving low data rate (data and voice), small number of devices
(8 at maximum), low power consumption and short range (up to 10 meter), such as
PC-to-peripheral networking, home networking, hidden computing, data
synchronization (such as between PC and PDA), mobile phone devices, and future
smart devices or entertainment equipment.
1.2. Bluetooth Architecture
The Bluetooth architecture and its mapping
to OSI model is shown below:

Figure 1: Bluetooth
architecture [2]
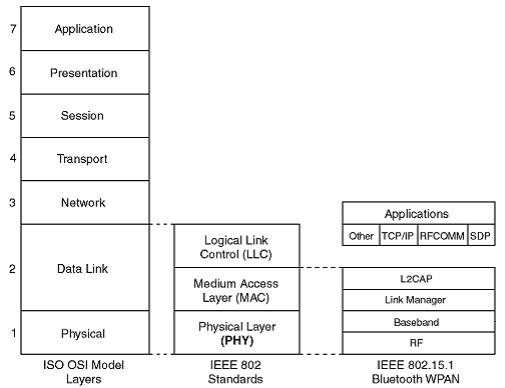
Figure 2: Mapping between
Bluetooth, OSI model and IEEE802 standards [3]
2.
Bluetooth Topology
There can be only 2 ~ 8 Bluetooth devices
talking to each other. This is called a piconet. Among these devices, there can
be only one master device, all the rest are slave devices. A device can belong
to two piconets meantime, serving as slaves in both piconet or a master in one
and slave in another. This is called a bridging device. Bridging devices
connect piconets together to form a scatternet:
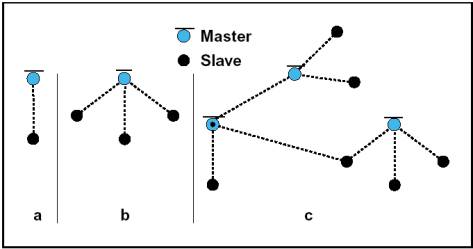
Figure 3: Single-slave
piconet (a), multiple-slave piconet and scatternet (c) [1]
3.
RF and Baseband
3.1. RF
Bluetooth operates at the unlicensed 2.5GHz
Industrial-Scientific-Medical (ISM) band. There are already many types of
devices using this band, such as baby monitors and garage door remote controls.
To avoid interfering with these devices, Bluetooth devices sends out very weak
signals (about 1 milliwatt). This limits the transmission range to 10 meters.
It also uses a frequency hopping technique, hopping randomly between 79 1-MHz
channels 1600 times per second (625 us time slot). Each piconet is synchronized
to a specific frequency hopping pattern, so that even different piconets do not
interfere with each other. A piconet can either be static or dynamic (chaning
when devices move in or out).
3.2. Modulation
The modulation in Bluetooth is Gaussian
Frequency Shift Keying (GFSK), with a BT = 0.5 and modulation index between
0.25 and 0.35:
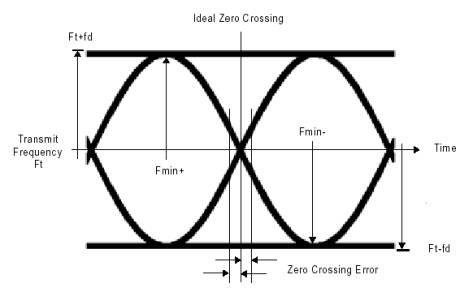
Figure 4: Bluetooth
Modulation [1]
3.3. Physical Links
Bluetooth protocol uses a combination of
synchronous and asynchronous links. A Synchronous Connection-Oriented (SCO)
link is a point-to-point link between the master and specific slave. It has
symmetric 64 kbps rate, typically used for voice transmission. It uses reserved
time slots, thus can be regarded as a circuit switching link. A master can
support up to 3 SCO links to one or multiple slaves, while a slave can support
up to three SCO links to one master or up to two SCO links to different
masters. Master transmits at reserved master-to-slave time slot, and slave
response in the following slave-to-master slot. SCO packets are never
retransmitted.
Asynchronous Connectionless (ACL) links are
used for data transmission, with 723.2 downstream/57.6 kbps upstream asymmetric
or 433.9 kbps symmetric data rate. There can be only one ACL link between the
master and all active slaves. Only the addressed slave device can response. ACL
packets can be retransmitted for data integrity.
3.4. Logical Channels
On top of phsical links, there is a sub
layer of logical channels, representing different types of information carried
through the physical links. LC channel carries low-level link control
information such as ARQ and flow control; LM channel carries messages for the
Link Manager layer, UA, UI and US channel carries asynchronous, isochronous and
synchronous user data respectively. LC channel is carried in the packet header,
others are in the payload.
3.5. Packet Format
Data in piconet is encoded in packets. The
general packet format is shown below:

Figure 5: General Packet
Format of Bluetooth [1]
A packet could contain a shorthanded access
code (68 bytes) part of the parket only, or access code plus header, or all the
three parts.
 Access Code
Access Code
Access code is used for synchronization, DC
offset compensation and identification. It is show below:

Figure 6: Access Code
Format of Bluetooth Packet [1]
There are three kinds of access codes.
Channel Access Code (CAC) is used to identify the piconet. All packets sent
through one channel of the piconet carries the address of the master device.
Device Access Code (DAC) is used for special signaling procedures, such as
paging and response to paging. A DAC for paging carries the address of paged
device. Each
Bluetooth device has a unique address
called BD_ADDR. It contains two parts: company ID which is unique across the
world, and device ID which is unique within the products of the company. The
Sync Word of the access code is derived from a BD_ADDR address using (64,30)
expurgated block code with an overlay of an 64-bit full length PN sequence.
The preamble is simply a fixed “0101” or
“1010” sequence depending on whether the LSB of the following sync word is “0”
or “1”.
If there is no header following in the
packet, the access code does not have a trailer.
Header
Header part of the packet is used by the
Link Control (LC) logical channel. It has the following format:

Figure 7: Header Format of
Bluetooth Packet [1]
![]() AM_ADDR: temporary
address assigned to active members of the piconet, used on all packets in both
direction sent between the master and the addressed slave. An all-zero AM_ADDR
is used to broadcast to all slaves.
AM_ADDR: temporary
address assigned to active members of the piconet, used on all packets in both
direction sent between the master and the addressed slave. An all-zero AM_ADDR
is used to broadcast to all slaves.
![]() TYPE: type of packet.
There are 12 types of packets for each SCO and ACL physical links, and four
types of common control packets for both.
TYPE: type of packet.
There are 12 types of packets for each SCO and ACL physical links, and four
types of common control packets for both.
![]() FLOW: for flow
control.
FLOW: for flow
control.
![]() ARQN: for ACK.
ARQN: for ACK.
![]() SEQN: contains
sequence number for packet ordering.
SEQN: contains
sequence number for packet ordering.
![]() HEC: header error
check for header integrity.
HEC: header error
check for header integrity.
3.6. Payload
There can be two types of payload: voice and
data. SCO packets only have voice field, while ACL packets only have data
field.
4.
Link Manageg
Link Manager messages are used for link
setup, security and control. They are transferred in the payload part of the packet.
LM messages are filtered out and interpreted by LM layer and are not passed to
upper layers. LM messages have higher priority than upper-layer messages.
5.
Logical Link Control and Adaption Protocol (L2CAP)
L2CAP layer operates over a single ACL link
provided by the baseband, which is setup by the LM layers using LM messages.
This ACL link is always avaliable between the master and any slaves. L2CAP
layer serves upper layer by transmitting data over channels (Fig. 8). Each
channel has two end points and a logical channel ID (CID).
A channel is setup in the following
procedure:
1.
Connection
A L2CAP entity requests connection to a remote device. The request has been
passed from upper layers of the first L2CAP entity. When a response is
received, the local device enters Config state.
2.
Configuration
Configuration process involves a negociation between two end points of the
channel over maximum transmission unit (MTU), a flush time out and quality of
service (QoS) agreement. Once all these issues have been successfully
negociated, the two end points enters Open state, in which data transfer may
begin.
3.
Disconnection
When a L2CAP layer receives a disconnect request from upper layer, it passes it
to the remote device. When response received, the channel enters Closed state.
6.
References
[1] Bluetooth V1.1 Core Specifications.
[2] http://www.stud.uni-karlsruhe.de/~uwid/mk/bluetooth.html
[3] http://www-106.ibm.com/developerworks/library/wi-checking/
[4] Bluetooth Basics, Rebecca Spaker.
[5]
http://www.howstuffworks.com/bluetooth.htm